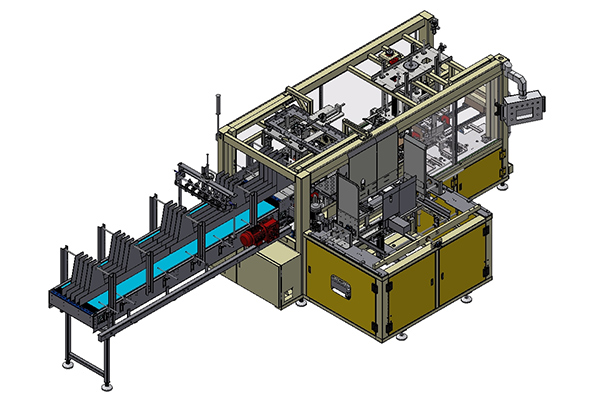
Línea de embalaje de cajas con coordenadas servo (con separador de cartón)

La línea de producción de empaquetado consta de una divisora de alta velocidad, una línea de transporte de productos, una línea de transporte con pinzas, un robot Hbot, un mecanismo de movimiento de doble eje, una línea de transporte de cajas, un mecanismo de detección, una pinza para separadores de cartón, un sistema de alimentación de separadores de cartón, un servocontrolador, una pinza para botellas y una valla de protección. La divisora de alta velocidad divide los productos en múltiples carriles, mientras que el mecanismo de movimiento de doble eje acelera su paso. Una vez que el producto llega a la estación de separadores de cartón, el robot Scar carga los separadores con los productos ya ordenados. Los productos llegan a la cinta transportadora de clasificación. Posteriormente, las pinzas recogen los productos y los colocan en la caja de cartón, que luego es transportada por la cinta transportadora de cajas.
El esquema completo del sistema de embalaje

Configuración principal
| brazo robótico | ABB/KUKA/Fanuc |
| Motor | SEW/Nord/ABB |
| servomotor | Siemens/Panasonic |
| VFD | Danfoss |
| sensor fotoeléctrico | ENFERMO |
| Pantalla táctil | Siemens |
| aparatos de baja tensión | Schneider |
| Terminal | Fénix |
| Neumático | FESTO/SMC |
| Disco de succión | PIAB |
| Cojinete | KF/NSK |
| bomba de vacío | PIAB |
| SOCIEDAD ANÓNIMA | Siemens/Schneider |
| HMI | Siemens/Schneider |
| Placa de cadena/cadena | Intralox/Rexnord/Regina |
Descripción de la estructura principal




Más programas de vídeo
- Empacadora de cajas servo coordinadas para botellas de vidrio con separador de cartón